

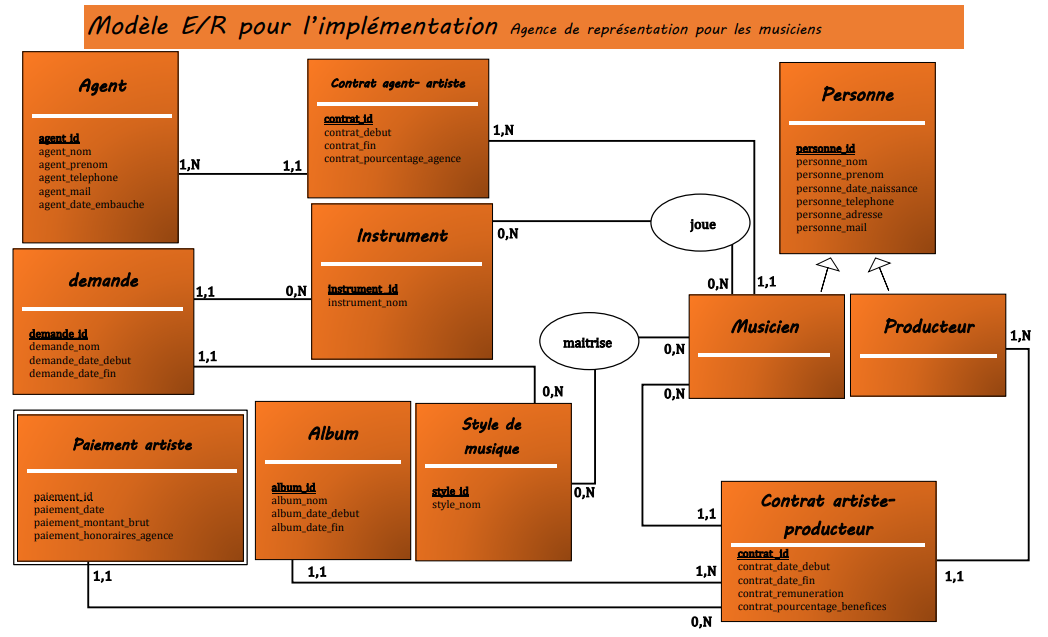
Un programme synchrone contrôlant un dispositif physique simplifie mais non trivial : un véhicule autonome dans une ville virtuelle en deux dimensions. Le but est donc de franchir toutes les étapes d’un parcours préétabli tout en respectant un certain nombre de contraintes (limitations de vitesse, feux rouges, évitement des obstacles). Le véhicule est équipé d’actuateurs et de capteurs.
Travail effectué
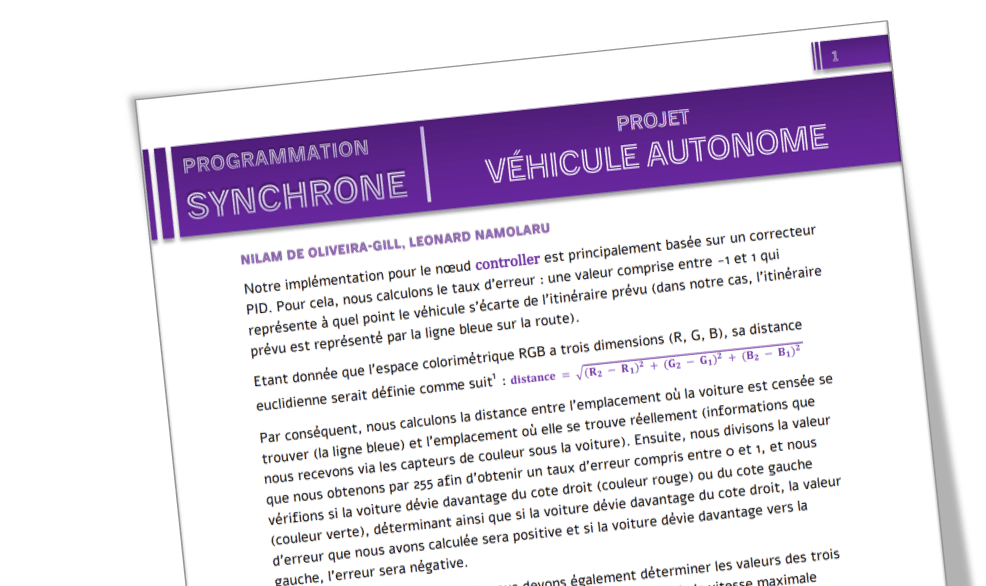
Compte tenu du dispositif décrit ci-dessus, notre tâche était d’écrire le contrôleur du véhicule de manière à ce qu’il utilise les entrées reçues par les capteurs afin de permettre à la voiture de parcourir l’itinéraire prédéfini de manière autonome. Notre implémentation est principalement basée sur un correcteur PID.
Le code du contrôleur se trouve sur mon GitHub, accompagné d’un rapport expliquant l’implémentation.